RoadRunner: Improving the Precision of Road Network Inference from GPS Trajectories
Abstract
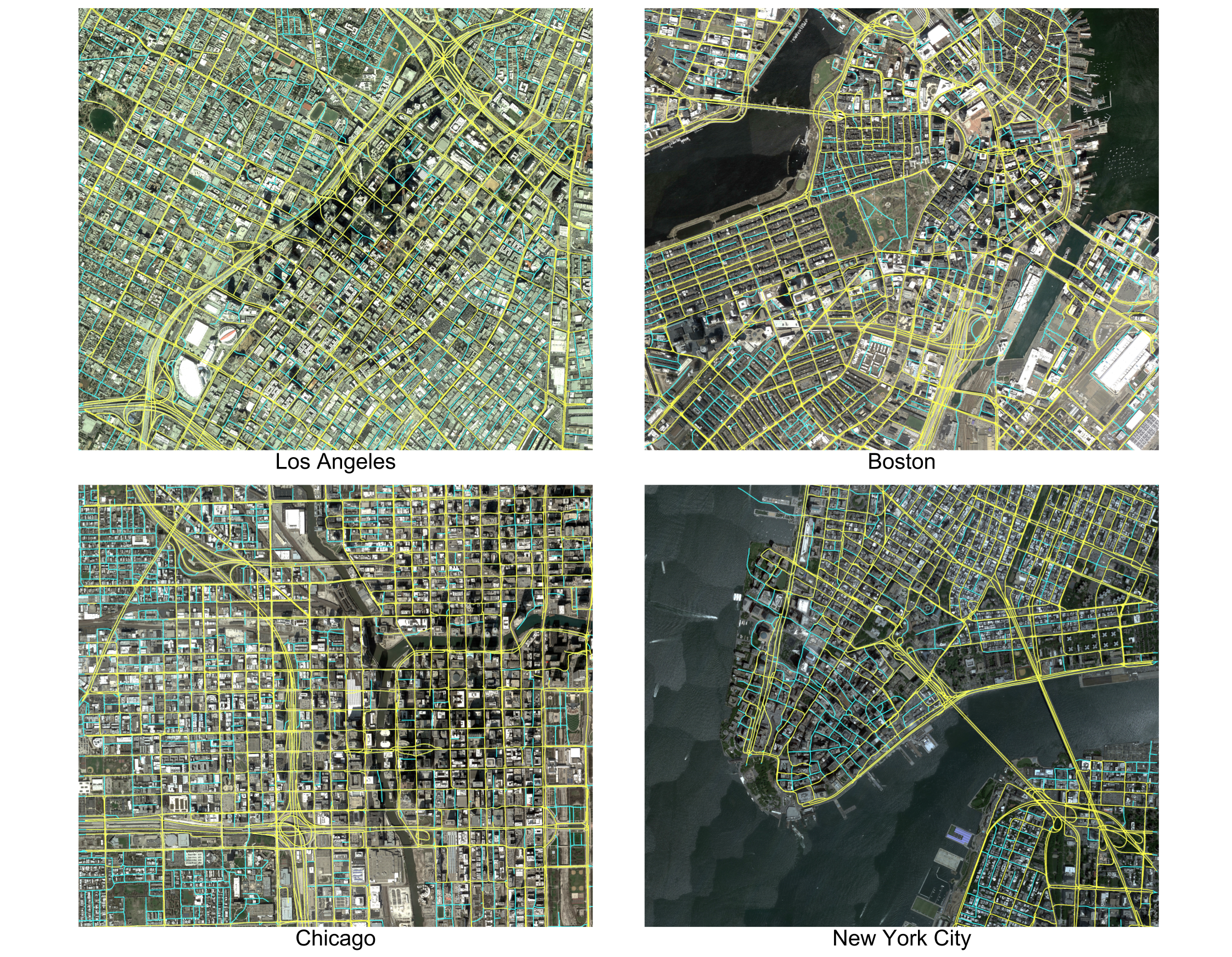
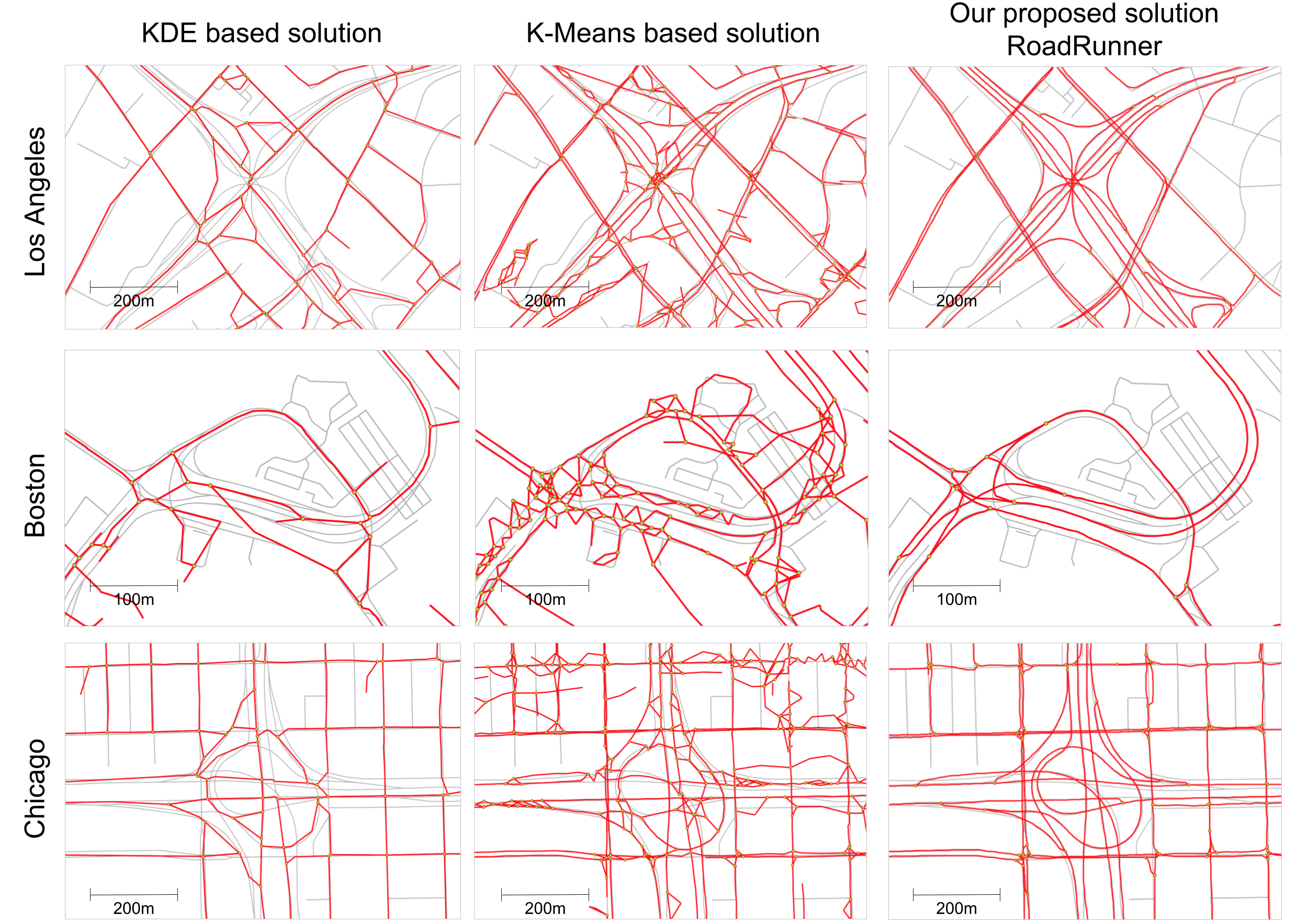
Current approaches to construct road network maps from GPS trajectories suffer from low precision, especially in dense urban areas and in regions with complex topologies such as overpasses and underpasses, parallel roads, and stacked roads. This paper shows how to improve precision without sacrificing recall (coverage) by proposing a two-stage method. The first stage, RoadRunner, is a method that can generate high-precision maps even in challenging scenarios by incrementally following the flow of trajectories, using the connectivity between observations in each trajectory to decide whether overlapping trajectories are traversing the same road or distinct parallel roads, and to correctly infer road segment connectivity. By itself, RoadRunner is not designed to achieve high recall, but we show how to combine it with a wide range of prior schemes, some that use GPS trajectories and some that use aerial imagery, to achieve recall similar to prior schemes but at substantially higher precision. We evaluated RoadRunner in four U.S. cities using 60,000 GPS trajectories, and found that precision improves by 5.2 points (33.6%) and 24.3 points (60.7%) over two existing schemes, with a slight increase in recall.
Example: RoadRunner in Boston
Comparison with other schemes
Combining Roadrunner with Roadtracer