Machine-Assisted Map Editing
- Paper: PDF
- Code: https://github.com/mitroadmaps/MAiD
Map editing today is very labor-intensive. When users add roads visible in satellite imagery to the map, they need to perform repeated clicks to draw lines corresponding to road segments:
This issue has motivated significant interest in automatic map inference, where maps are automatically constructed from GPS trajectories and satellite imagery. However, these systems have not gained traction because high error rates make full automation of the map editing process impractical (even state-of-the-art systems have error rates >5%).
Thus, we believe that automatic map inference can only be useful if it is integrated with existing, human-centric map editing workflows. We developed Machine-Assisted iD (MAiD), where we integrate machine-assistance functionality into iD, a web-based OpenStreetMap editor.
At its core, MAiD replaces manual tracing of roads with human validation of automatically inferred road segments. We designed MAiD with a holistic view of the map editing process, focusing on the parts of the workflow that can benefit substantially from machine-assistance. Specifically, MAiD accelerates map editing in two ways:
- In regions where the map has low coverage, MAiD focuses the user's effort on validation of major, arterial roads that link towns and centers of activity.
- In regions where the map has high coverage, MAiD reduces the time spent manually scanning the imagery and other data sources for unmapped roads.
Here are two videos of MAiD in action:
Machine-Assisted iD (MAiD)
To use MAiD, users first select a region of interest for improving map coverage. MAiD runs an automatic map inference approach in this region and obtains automatically inferred road segments.
MAiD then produces a yellow overlay that highlights these inferred segments over the satellite imagery. Users can left-click on segments in the overlay to incorporate them into the map. If an inferred segments is erroneous, users can either ignore the segment, or right-click on the segment to hide it.
Mapping Major Roads
However, many inferred segments correspond to straight, short service and residential roads that are not much faster to validate than to trace by hand. To address this, we first consider adding roads in regions where the map has low coverage. In practice, when mapping these regions, users focus on tracing major roads that connect centers of activity within a city, or link towns and villages outside cities. Users skip short, minor roads because they are not useful until these important links are mapped. Because major roads span large distances, though, tracing them is slow. Thus, validation can substantially reduce the mapping time for these roads.
We develop a pruning algorithm to retain only the inferred segments that are most likely to correspond to major roads. In MAiD, users can press a button to toggle between an overlay containing all inferred roads, and an overlay after pruning:
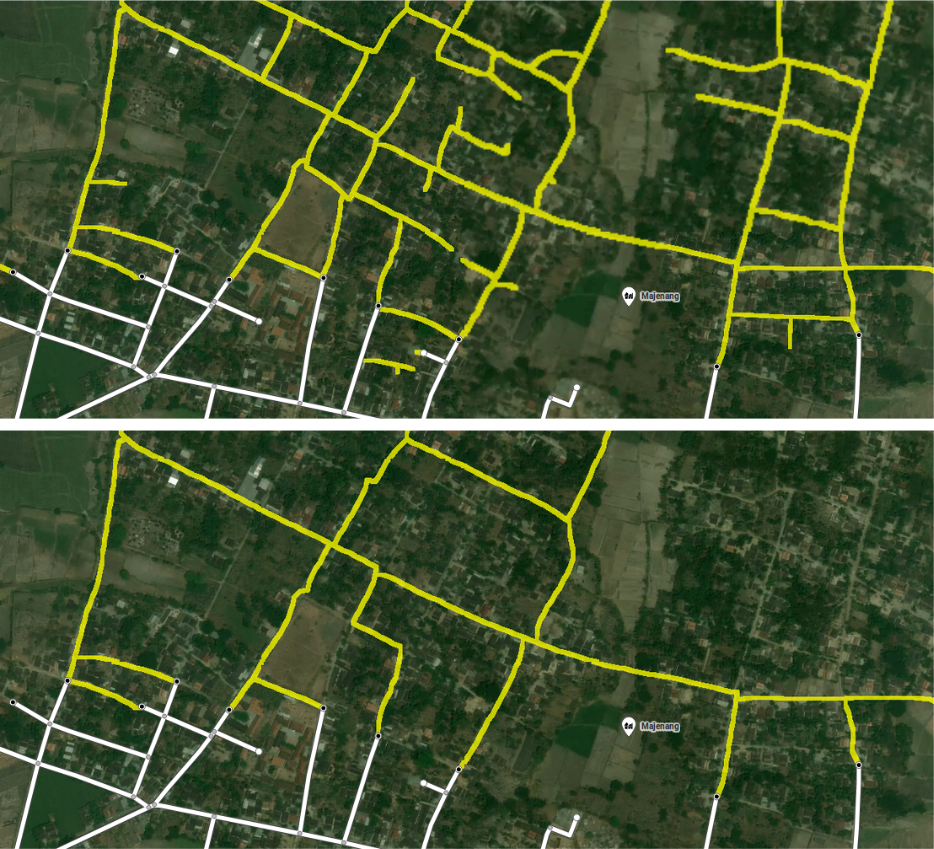
With the pruned overlay, users can quickly map major roads in large regions. We conducted a user study to compare MAiD's pruning function against using iD without machine-assistance. We asked participants to add roads in a region of Indonesia with no coverage in OpenStreetMap. When given a fixed time to map roads, participants produced road networks with 1.7x the coverage and comparable error when using MAiD.
Teleporting to Unmapped Roads
In regions where the map already has high coverage, further improving the map coverage is tedious. Because most roads already appear in the map, users need to paintstakingly scan the satellite imagery to identify unmapped roads in a very time-consuming process.
MAiD addresses this with a teleport capability, which pans the editor viewport directly to an area with unmapped roads. This enables users to teleport to an unmapped component, add the missing roads, and then immediately teleport to another unmapped component. By eliminating the time cost of searching for unmapped roads in the imagery, MAiD speeds up the mapping process significantly.
We conduct another user study to evaluate the MAiD's teleport capability with an editor that does not have machine-assistance. Participants added roads in a region of rural Washington where most major roads were already covered in OpenStreetMap. We again gave participants a fixed time for the task, and found that when using MAiD, participants were able to add 3.5x more roads (in terms of road length) to the map.
Conclusion
By focusing on map editing tasks where machine-assistance can provide the most benefit, MAiD improves mapping productivity by as much as 3.5x. Through this improvement in productivity, we believe that MAiD has the potential to substantially improve coverage in road maps.